Capteur à ultrasons
Principe de fonctionnement et Test
Le principe de fonctionnement du capteur est entièrement basé sur la vitesse du son.
Voilà comment se déroule une prise de mesure :
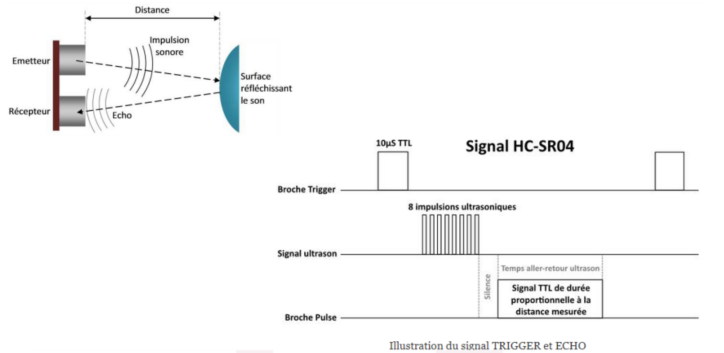 1. On envoie une impulsion HIGH de 10µs sur la broche TRIGGER du capteur.
1. On envoie une impulsion HIGH de 10µs sur la broche TRIGGER du capteur.
2. Le capteur envoie alors une série de 8 impulsions ultrasoniques à 40KHz (inaudible pour l'être humain, c'est quand plus agréable qu'un bip).
3. Les ultrasons se propagent dans l'air jusqu'à toucher un obstacle et retourne dans l'autre sens vers le capteur.
4. Le capteur détecte l'écho et clôture la prise de mesure.
Le signal sur la broche ECHO du capteur reste à HIGH durant les étapes 3 et 4, ce qui permet de mesurer la durée de l'aller-retour des ultrasons et donc de déterminer la distance.
N.B. Il y a toujours un silence de durée fixe après l'émission des ultrasons pour éviter de recevoir prématurément un écho en provenance directement du capteur.
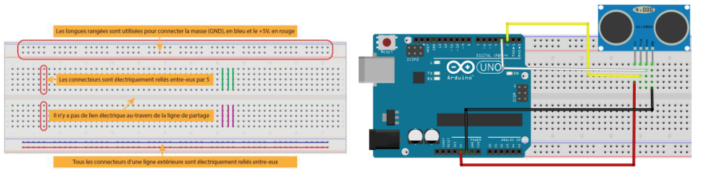
Le montage est d'une simplicité déconcertante voir photo ci-dessous :

Câblage
Appeler le professeur avant de brancher le câble USB!
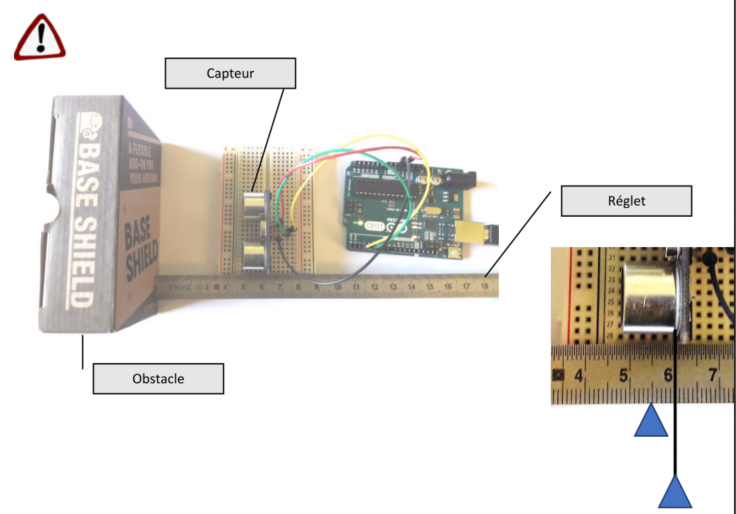
Afin de mesurer la position de l’obstacle procéder de la manière suivante :
1- Copiez et Téléverser le programme ci-après pour effectuer les mesures
2- Prenez pour référence la base du circuit imprimé (60mm)
3- Retranchez 5 mm (origine du signal soit 55 mm)
4- Lancez «Moniteur série » ou le raccourci clavier« Ctrl+Maj+M »
5- Réalisez une série de mesures et sur une feuille complétez votre tableau.
6- Tracez les 2 courbes (val. Réglet – Val. capteur). Le capteur vous semble-t-il fiable ?

Programme
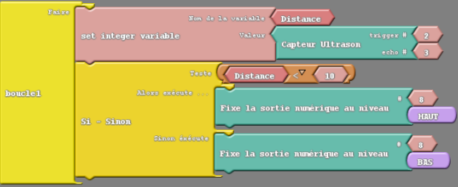
Mon Premier programme : Allumer une led en utilisant le capteur
 Ce programme permet de désactiver une del sur le port 8 dès que le capteur à ultrasons sur les ports 2 et 3 détecte quelque chose devant lui à moins de 10cm, elle s’allume dans le cas contraire elle reste éteinte.
Ce programme permet de désactiver une del sur le port 8 dès que le capteur à ultrasons sur les ports 2 et 3 détecte quelque chose devant lui à moins de 10cm, elle s’allume dans le cas contraire elle reste éteinte.
A vous de jouer !